- Created at
コアレスモーター双発ラジコン製作
コアレスモーター8520とmofsetを合わせてモーターを自分で制御できれば軽量小型ラジコンが作れると思い始めた本計画.まさか1か月以上格闘することになるとは思わなかった.モーター制御をなめていた.
パーツ | 型番 |
|---|---|
モーター | コアレスモーター8520 |
プロペラ | DJI Tello用プロペラ |
マイコン | ESP32 C3 supermini |
翼型 | AG35 |
スパン | |
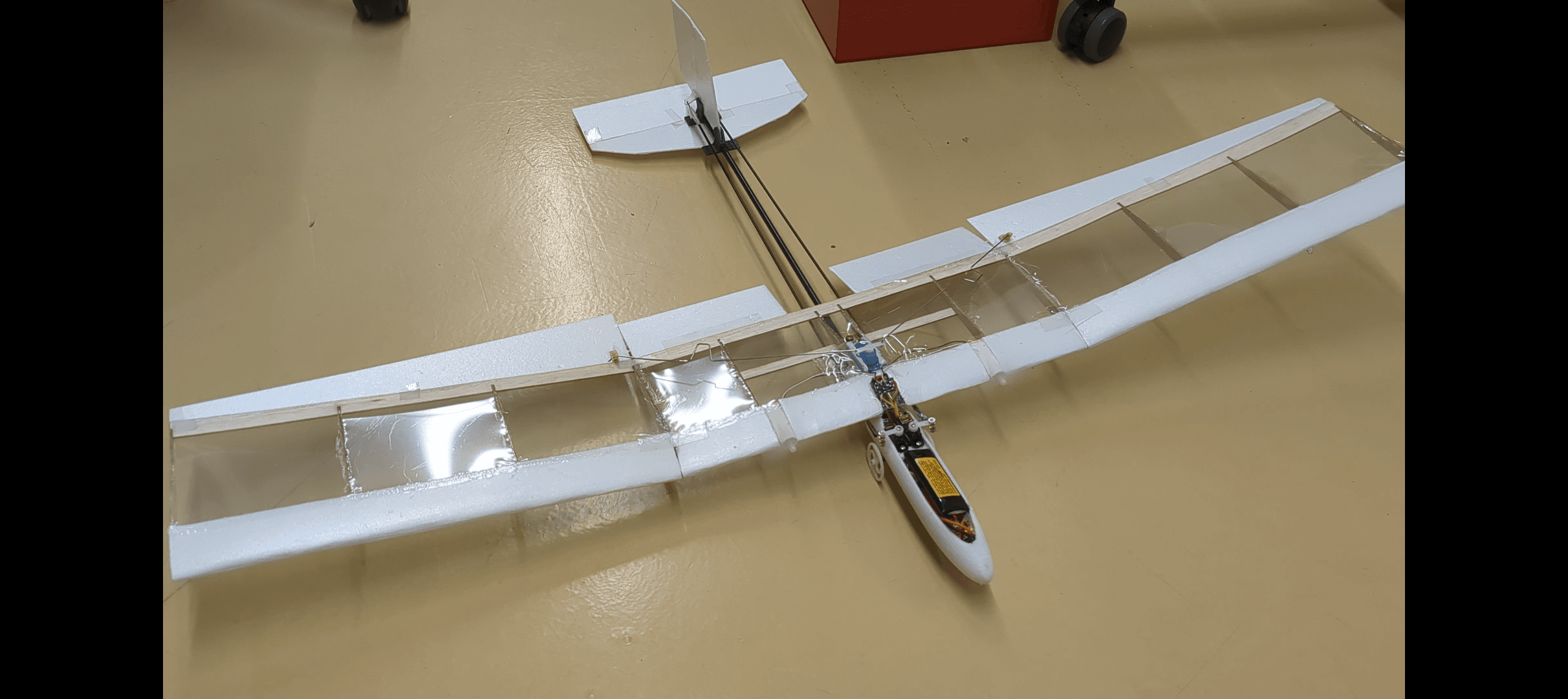
ひとまずCADを書き機体を組み立てた.
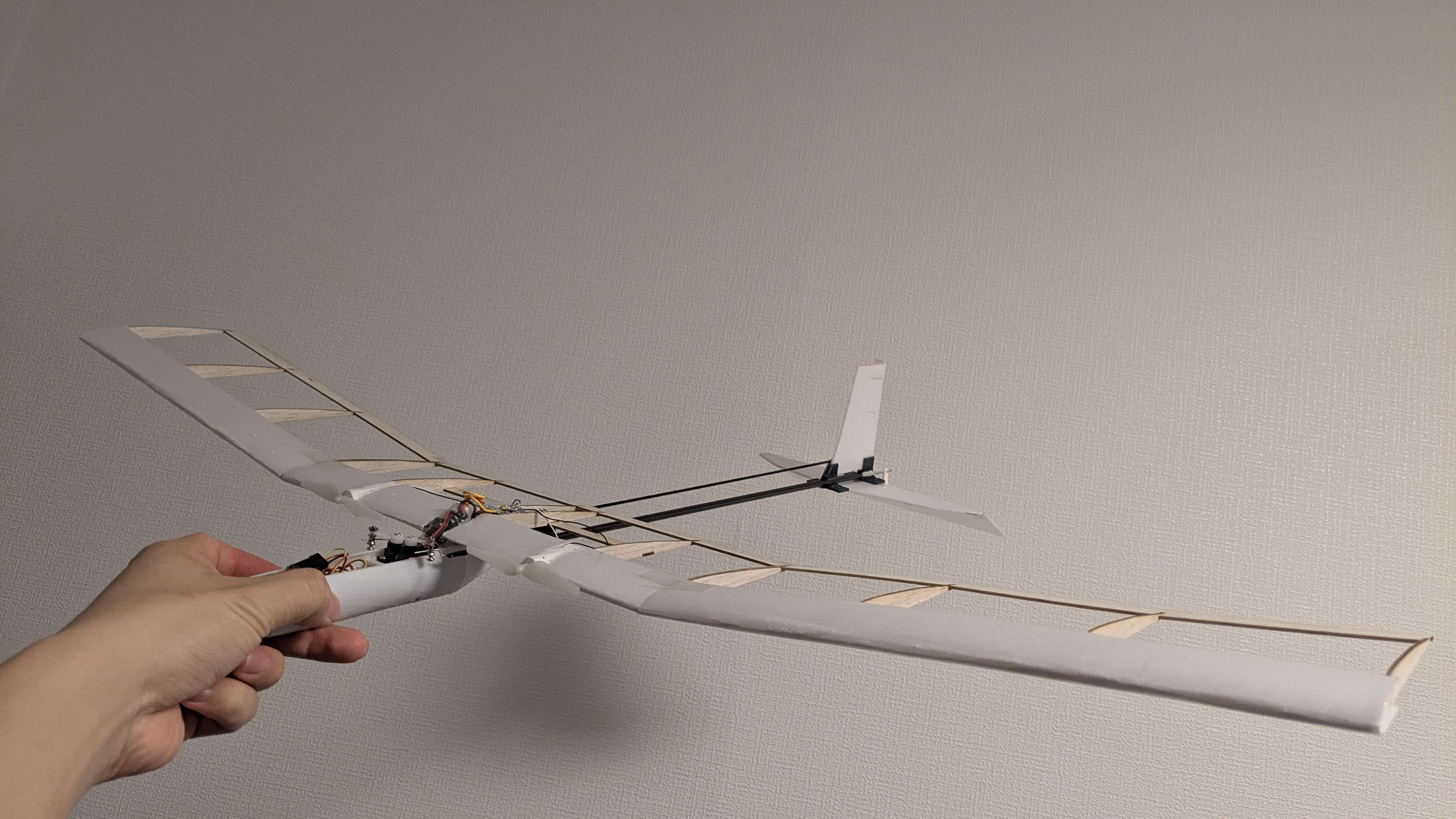
胴体は直前のTOKAI2024からの流用.
ここから長いモーターとの格闘が始まる.モーターなんてみんな回してるし簡単に回ると思っていた.
試してダメだったモータードライバーは以下の3つ.
- DRV8833
- L298N
- NchパワーMOSFET 60V5A 2SK4017
これはこいつらが悪いんじゃなくモーターにあっていなかった.複数の検証の末にわかった状況は以下.
- USB給電では動くがリポでは動かない.
- オシロスコープではPWM信号が正しく生成されている
- 電流を流すとモーターから音が出るので何か知らの電流が流れている.
この状況からおそらくトラブルの原因はモータードライバーにあり,Mofsetを使用しモータードライバーを作り変える必要があった.電子工作素人でMofsetを触るのは初めて.
細かいことはいったん無視してMofsetというのは電圧により通電と絶縁を操作できる部品らしい.簡単なよくある図を載せておく.
ゲートに電圧を印加する.これにより導通と絶縁を操作できるのでまさにゲートである.ゲート電圧はソース電圧に対する電圧の大きさ.ソースより高い電圧なのがP-Mofsetで低いのがN-Mofsetらしい.
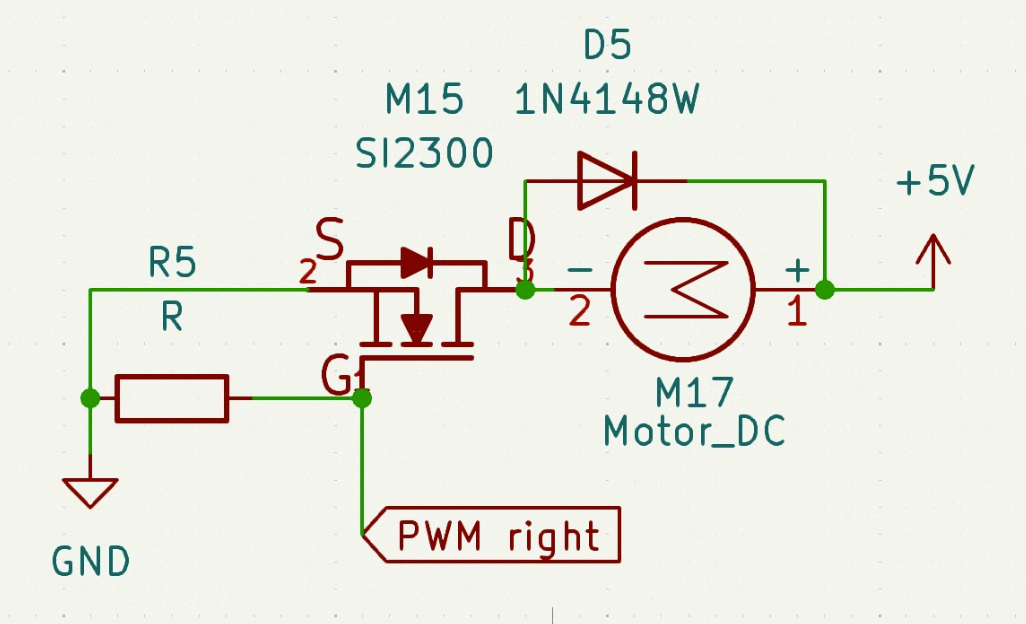
回路は以下の通り.ほかの機体向けに書いていた回路図だけどダイオードとかの配置は共通.
これで問題は最後,8250モーターにあうmofset選定が必要.突入電流が非常に大きいことがわかっておりそれに対応できることが必要.
ESP32のロジック電圧が3.3Vであればゲート電圧が3.3Vのものを買えばいいと思ったのだがそれが落とし穴.ゲート電圧とはゲートが開き始める電圧でありその段階では抵抗が非常に大きくほとんど電流が流れない.ゲートが開いたmofsetは抵抗とみなしていいらしい.
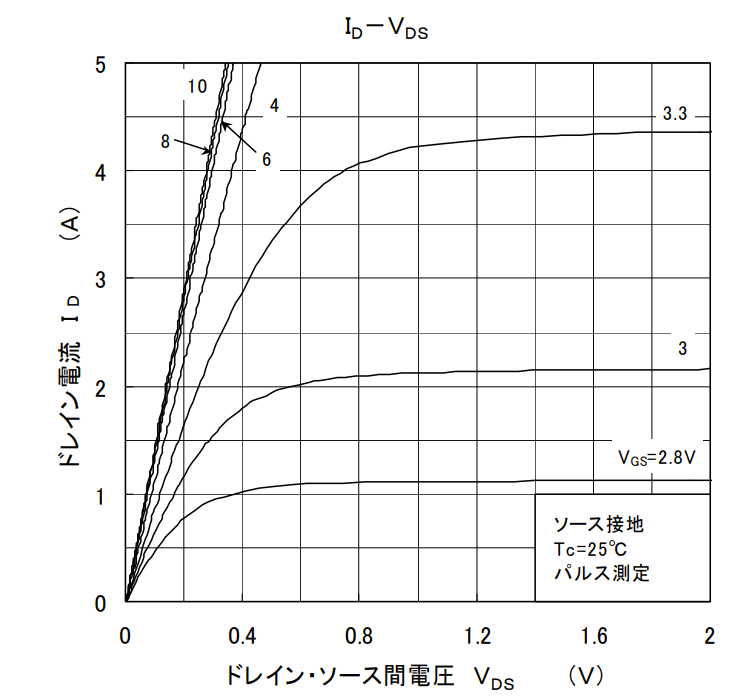
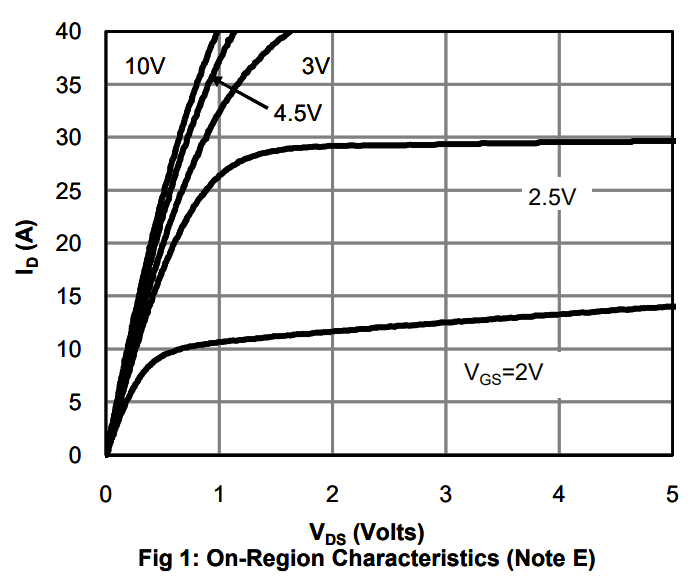
この状況の例として失敗した2SK4017のデータシートを見てみる.確かに3.3Vでは電圧が高くても電流が流れにくいことが確認できる.これに加え電圧印加から実際にゲートが開くまでのタイムラグがある.だからPWMのように高周波でゲートに負荷してもこのようなmofsetでは流れなかったと考察してる.
そして最終的に使用したmofsetはAO3400Aというもの.youtubeで見つけた動画(https://youtu.be/xW2Nwg_RX84?si=7mD7D6jgM1QOvZJN)を参考に選定したが回らんので自分で秋月でデータシートみて選定した.
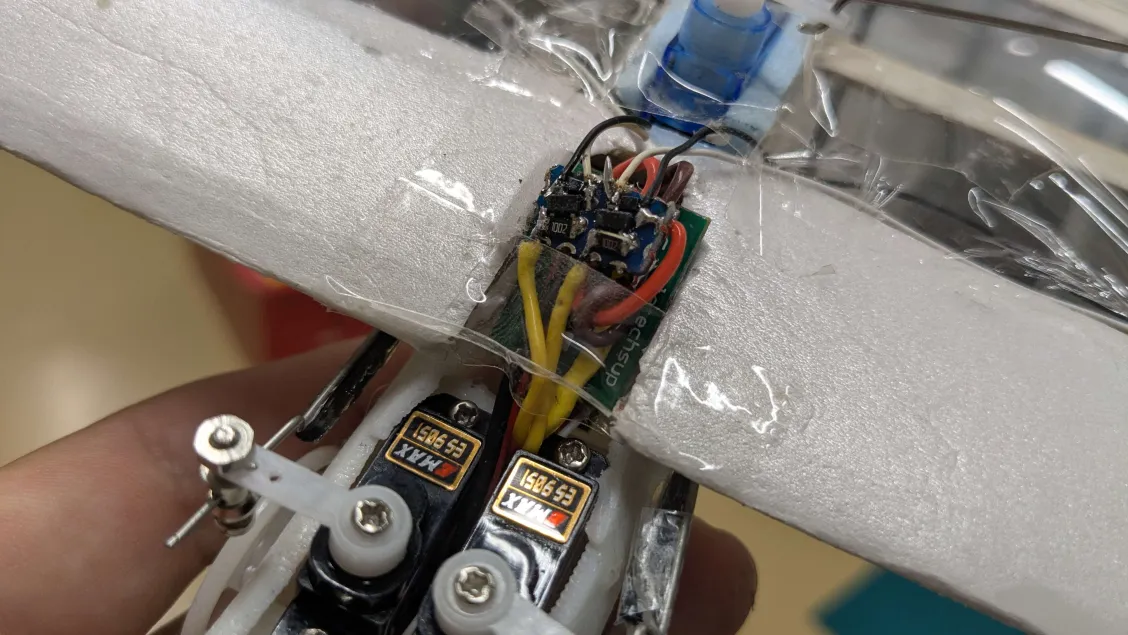
これで回るようになった.しかし貧弱にしか回らない.なんでか考えたが試しにPWMに255入れたら0.05 V,1000入れたら0.2Vって測定された.8bitの波形を作ってるのにおかしい.だが起きていることが現実.12bitとみなしPWMを入れると機嫌よく回ってる.仕方がないのでそのまま動かすことにした.回路が書けないのでユニバーサル基板に無理やり実装.汚いモータードライバー・・・
そうして無事に飛行.推力重量比が1以下なので非常に失速に弱い.操縦が難しい.
飛行動画はサークルのTwitterのみ
小型ドローンでよく使用されるコアレスモーターを搭載した双発機が飛行しました🛩️
— 名大飛行ロボットサークル NAVIX (@nu_navix) May 5, 2025
これで何発機でも作れるらしい!?!?
推力が弱いのでフルスロットル縛りで飛行中です https://t.co/aG9oeHc8dF pic.twitter.com/EGiL3ydFoQ
感想
あまりに苦労した・・・.3月に始めたのに飛んだのが5月.結構苦労したがモーターが身近になったしモジュールをつなぐだけじゃなくちゃんと回路から理解できたので非常に勉強になる機体でしたね.