- Created at
ロボットカーをつくる ①初期検討
背景
今回は上の画像のようなロボットを製作していく。前回のコアレスモーターとの格闘の中で誤ってDRV8833というモータードライバーを買いすぎてしまった。またラジコン飛行機の制御をはじめる前に簡単なロボットの制御からやっていこうと思う。このロボットに飛行機の制御系を積んで検証するランニングテストベッドに出来ればなおよしと思ってる。
構想
これまでCanSatの製作経験があるもののCanSatをつくるわけではない。でもいきなり無からは作れない。そこで先行例としてインスタグラムで見かけたbird_tokyoさんのロボットを参考にした。今回購入した物品とリンクを載せておきます。ご参考までに
電源については大須にいってボントンで単三電池4つの電池ボックスを購入。名古屋に訪れた際はぜひ行ってください。単三電池は1.5 Vなので、4つで6.0 Vになる。
また基板についても試作なのでユニバーサル基板を購入。
製品名 | 用途 |
|---|---|
4個のDC電動モーター3-6VデュアルシャフトギアードTT DCモーター磁気ギアボックスエンジンと4個のスマートRCカーロボットタイヤホイール | モーターとタイヤ |
5-20PC DRV8833 モータードライブモジュールボード 1.5A 3V-10V シングル H ブリッジ 6Pin ステップモーター過電流保護 DC ギアモータードライバー | モーター制御用 |
マイコン | |
距離センサ | |
前方ボールキャスター |
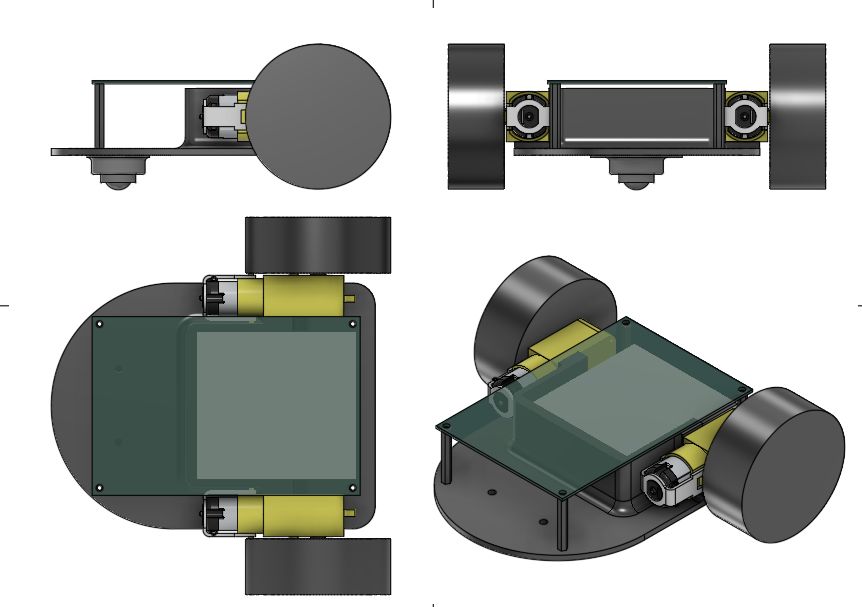
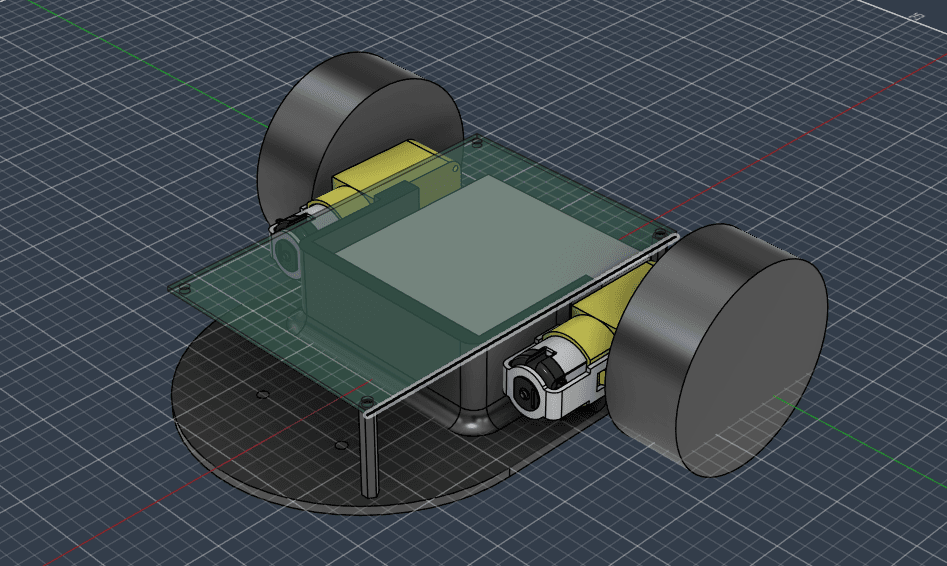
構造仕様検討
これらをいったんつなぐためにベースプレートを作成。タイヤ2つで姿勢は維持できないので前方にローラーを設置。このローラーを採用する部分を特にbird_tokyoさんのロボットから参考にし、ホームセンターでよさげなキャスターを購入した。井口機工製作所 IM-12であることは購入後にわかった。
Fusionで簡単にベースプレートをモデリング。基板、モーター、電池の最小構成のモデルです。
モーターは適当なデータをThingverseより引用、また前方ボールキャスターは井口機工ホームページよりデータをダウンロードできたのでそちらを使用した。昔はノギス片手にモデリングを頑張ったが、最近は積極的にデータをダウンロードするようにしている。