- Created at
東海クライマックスシリーズに参加しました~②構造設計と基板設計~
授業の反省と設計改良

授業で作ったグライダーから半年.院試が終わりいよいよ東海クライマックスシリーズに向けた機体を作ることになりました.製作期間1か月の中でどうするかかなり悩んでいました.私の参加する大会から扇風機の外乱が追加されるというのです.これによりほぼ全ての諸元を見直すことにしました.
m外乱に強く,授業より滑空性能に優れた諸元を求めました.この二つの設計要求への回答は翼面荷重を大きくすることが基本になります.翼面荷重とは機体の翼面積あたりの重量でこの値が大きいほど機体は速くなります.速いほど同じ大きさの風でも機体の速度に対し相対的に小さくなり,十分速いと外乱の影響を無視できるようになると考えました.
続いて滑空距離を考えました.この大会ではグライダーが同じエネルギーをもって飛んでいくため損失(=抵抗)を減らすことがポイントです.よく翼型を変えたりアスペクト比を伸ばしたりする例がありますがこれは抗力係数Cdを減らすための工夫で翼面積が同じなら確かに抵抗が減ります.しかし,抵抗の式改めて見ると抵抗は翼面積に比例するため機体をスケールダウンし小さくすることで抵抗そのものを減らせると考えました.
そこで重量の目標を100gに設定しました.スケールダウンした諸元は以下の通りです.スパンが約半分になり,かなり不安でした.翼型や翼平面形の見た目に大きな変更はしませんでした.
諸元 | 単位 | |
|---|---|---|
スパン | mm | 600 |
翼面積 | mm^2 | 65000 |
翼面荷重 | g/dm^2 | 15 |
重量 | g | 100 |
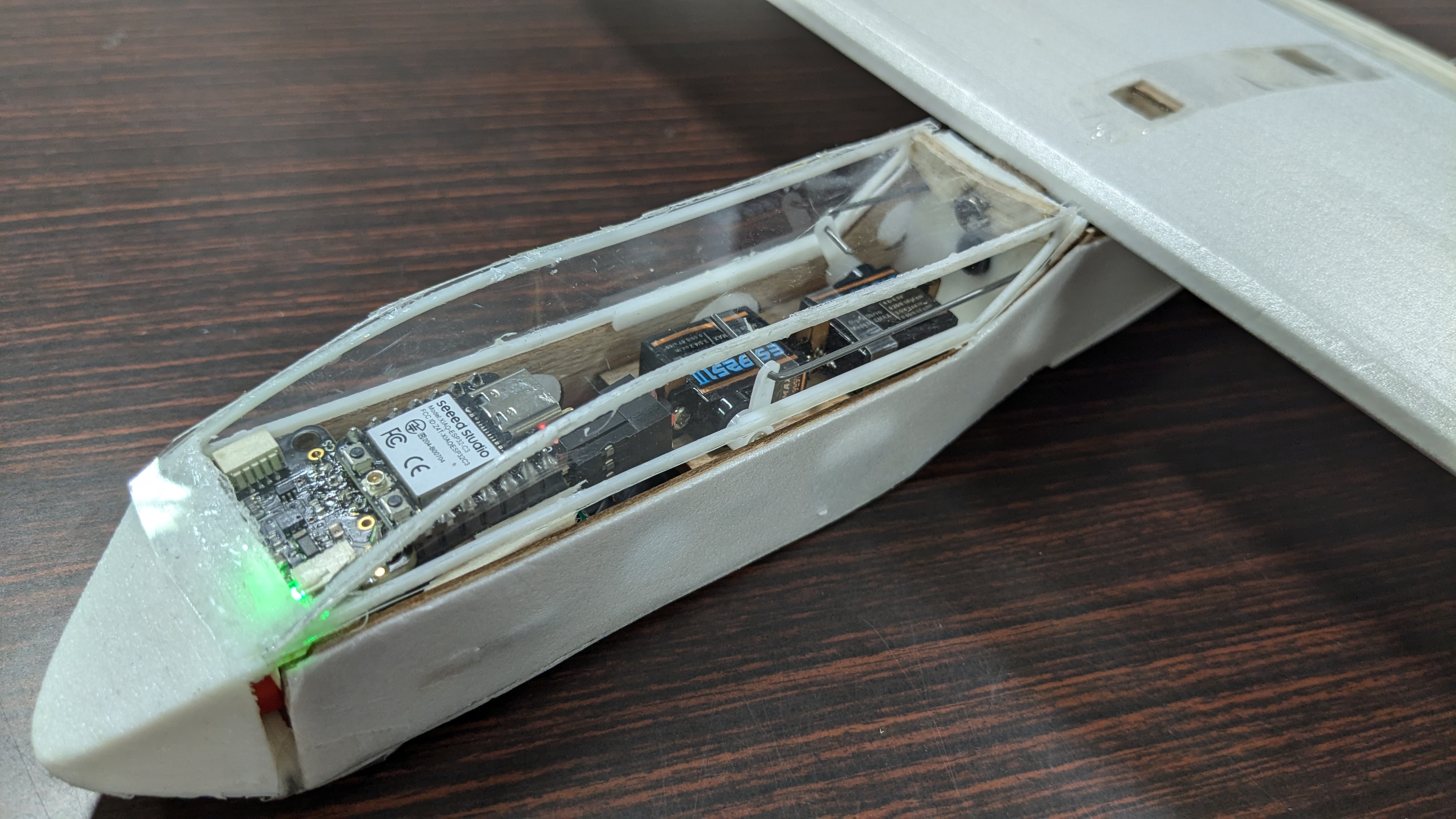
基盤の設計
配布された基盤でうまくシステムが動作していなかったので基盤のリメイクを目指しました.講義での主な問題は1セルのLipoバッテリーで5vサーボを直接駆動しようとしていて電圧が不足していたことでした.
使用したパーツリストです.マイコンは流行りのXIAO ESP32C3を使用しました.BECモジュールは電子工作をされる方にはなじみがないかもしれません.BEC電源はラジコン用のブラシレスモーターアンプに受信機やサーボモーターに供給できるようについていることが多いのですが,昇圧回路と思っていただいて問題ないと思います.
パーツ | 製品 | リンク |
|---|---|---|
マイコン | Seeed Studio XIAO ESP32C3 | |
9軸センサ | BNO055使用 9軸センサーフュージョンモジュールキット | |
BECモジュール | FC 受信機用昇圧レギュレーター(5V1A) JST 赤 | |
サーボ | EMAX 3.6g ES9251II デジタル |
基盤の設計といいつつ回路図もかけない,KiCADも使えないので特別説明できることがありません.ユニバーサル基板で適切につないで動作するようにしました.
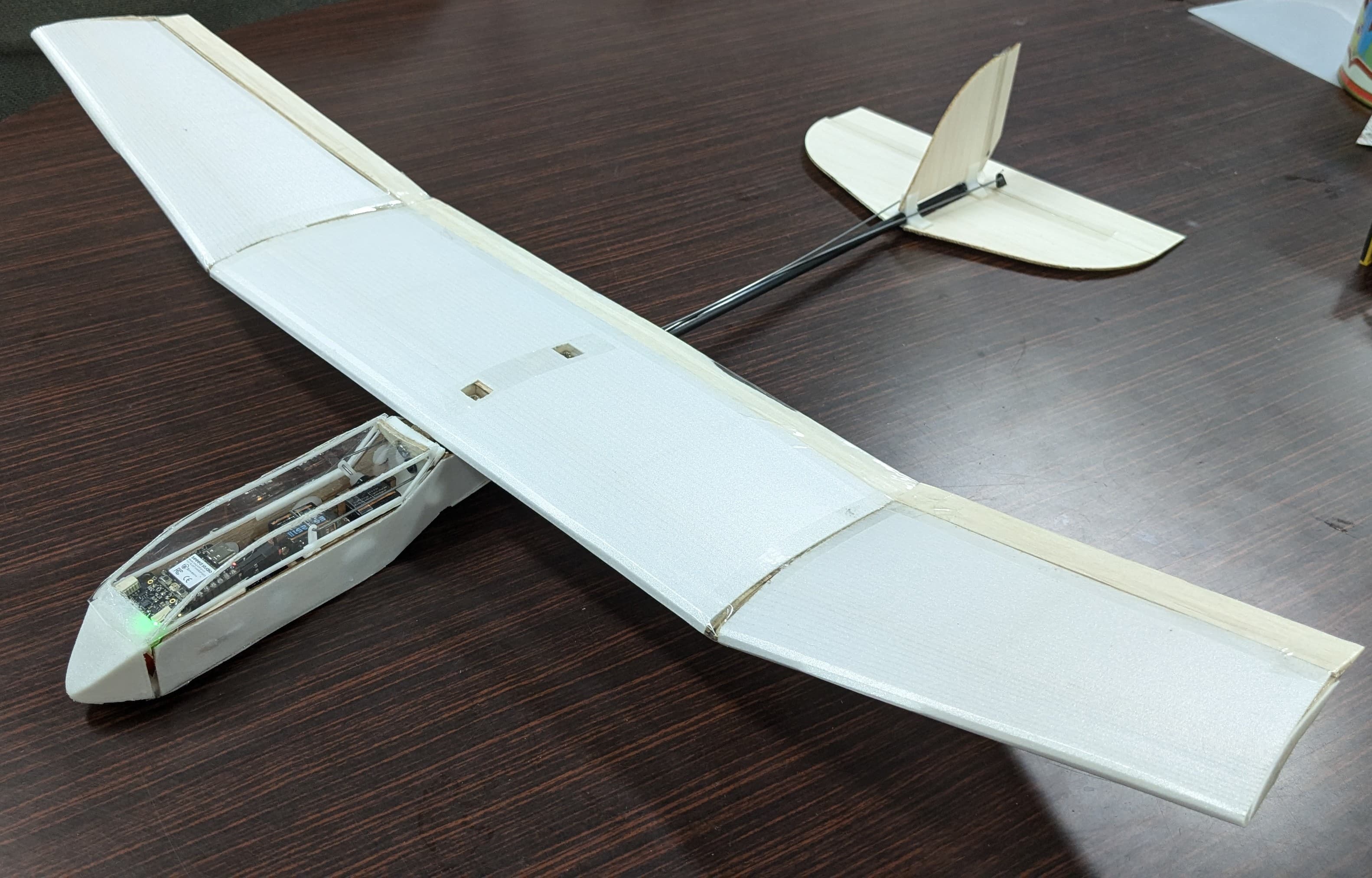
機体製作
機体構造部材はxtool D1 5W を使用しレーザー加工で切り出しました.大学のレーザーもありますが使用時間が合わず自宅で切りました.基本構造は授業の設計と同じでしたがスケールダウンによってつくることが難しくなりましたね.今回は小型かつ高速になること,滑空機なので翼面荷重は重くていいことを踏まえて自身としては初めてのフルプランクの機体に取り組みました.このプランクはスチレンペーパーを使用し大学のレーザー加工機で彫刻の要領で溝加工を実施,賦形性を改善し使用しました.

今回は胴体も設計しました.自立飛行する機体は制御のミスで頭から落ちることが多々あるので授業のPLAからTPUに変更し形状も変更したことで破損することを減らしました.通常のPLAとTPUは密度の差がほとんどないので重心への影響はないです.剛性も空気力に影響では変形しないのでヨシとしました.キャノピーのできは個人的には50点ですがマグネットキャノピーなど新しい要素を取り入れてみたと思います.キャノピーにはジョーシンの模型コーナーで見つけた0.2mmの透明プラ板を使用しました.
リンケージはワイヤーリンケージのプッシュ-プル方式でした.今作るなら糸リンケージでプル-プル形式にしますね.プッシュ時にリンケージが座屈する問題はなかなか解決に難航しました.尾翼にはついでにレーザーで刻印してみました.
本番のフライト
一番とんだ一回目の飛行の動画リンクです.https://youtu.be/sWnln2CRswA?t=64
あまりに暴れているし例年にない高速機体だったのでカメラに収まっていませんが私の考察としては初期の外乱(右翼下方からの吹上)により機体が左方向にバンク,一方速度は上昇しきって速度が落ち着くとピッチが下がっているのでエレベーターの制御乳直がピッチ上げに入りバンク角が深いまま十分早くエレベーターが引かれたことで機体が大きく左旋回したものと考えています.別カメラの映像にはその様子が残っていました.以降ラダーのリミッターなどいろいろ触りましたがうまくロールを制御できず終わってしまいました.ゴムの引く量を制限し低速で飛行させたりエルロンをしようする必要があったと考えています.
感想
不完全燃焼.結果としては非常に残念でした.一回目の定常滑空の高度は断トツで高かったので最高点を出せるポテンシャルのある機体設計だったと思います,ロールをエルロンで抑えることができていればと悔やむばかりです.ただ一方で初期の検討段階でエルロンの必要性についての議論ができていなかったことが最も問題に考えています.高速になる時点で方位角は姿勢角以上に短い時間で変化していく可能性を考慮しエルロンを設計に含めることでより多くの飛距離をのこせたと考察しています.